I don’t think it warrants a category (at least yet)… we don’t even have a single topic on it yet
that said, It might be an idea for peeps to separate the current discussion out into different topics if they want to explore further.
(I think users can create tags, if they want to link together… once we have a few )
unfortunately, I can’t really split out this topic, as its wandered around a bit too much, so would loose coherence if I started pulling posts out.
… so perhaps just create new topics, and just link back to original post in this topic, as a reference.
ofc, if we start getting a lot of topics on different sensors etc, then we can reconsider a category.
edit: I could also re-title this topic, if peeps want !?
topic has strayed pretty far from the original OP which was about how Roger had designed the Linnstrument… but it doesn’t really matter
I think he founded both Interlink and Sensitronics. (He replied to me in person one time when I emailed Sensitronics, which surprised me.)
I’ve been looking at FSR matrix offerings on Ali Express, which most often seem to be designed for measuring body pressure for things like shoes…
…but the Linnstrument takes a more advanced approach, of course, with its intercrossing strips. You’d need to spend a few thousand to create a new Tangio one.
The Ceradex 3-axis version looks interesting…wonder how that works…
A “regular FSR” only gives you a pressure readout, whereas a FSPotentiometer kinda includes an FSR but the pressure resistance of that FSR also kinda becomes the wiper connection of the potentiometer part when you press it. You need to alternate between two connection schemes to be able to measure both force and position.
The Ceradex (and other brands) XYZ pad is basically like the Linnstrument, two axes of potentiometers, one top facing down (x), one bottom facing up(y), and a fsr layer making contact between those two pot layers (AFAIK)
Very intrigued by this. I might actually order two, one for use in daily office life, and one as a base for hacking about.
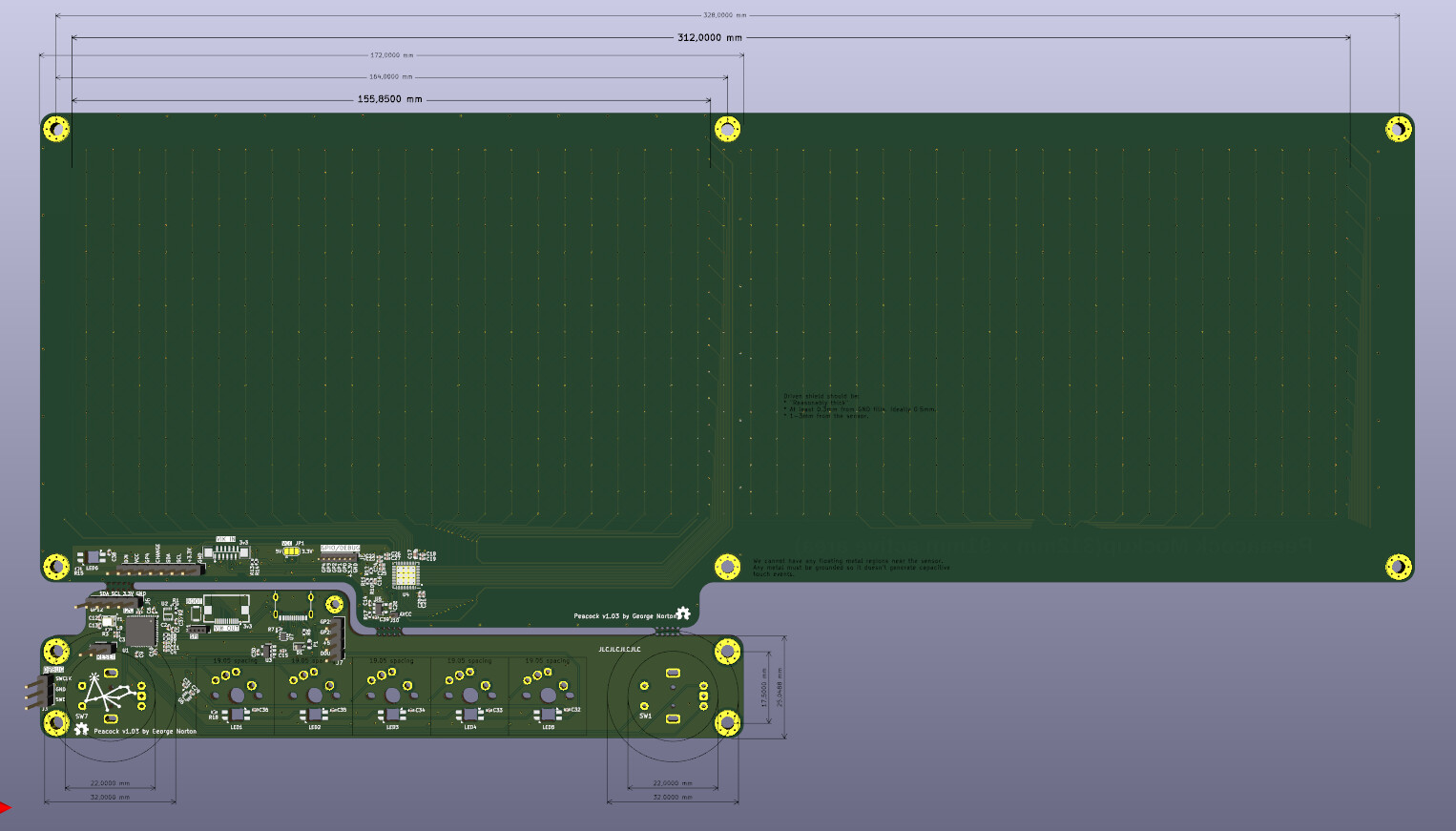
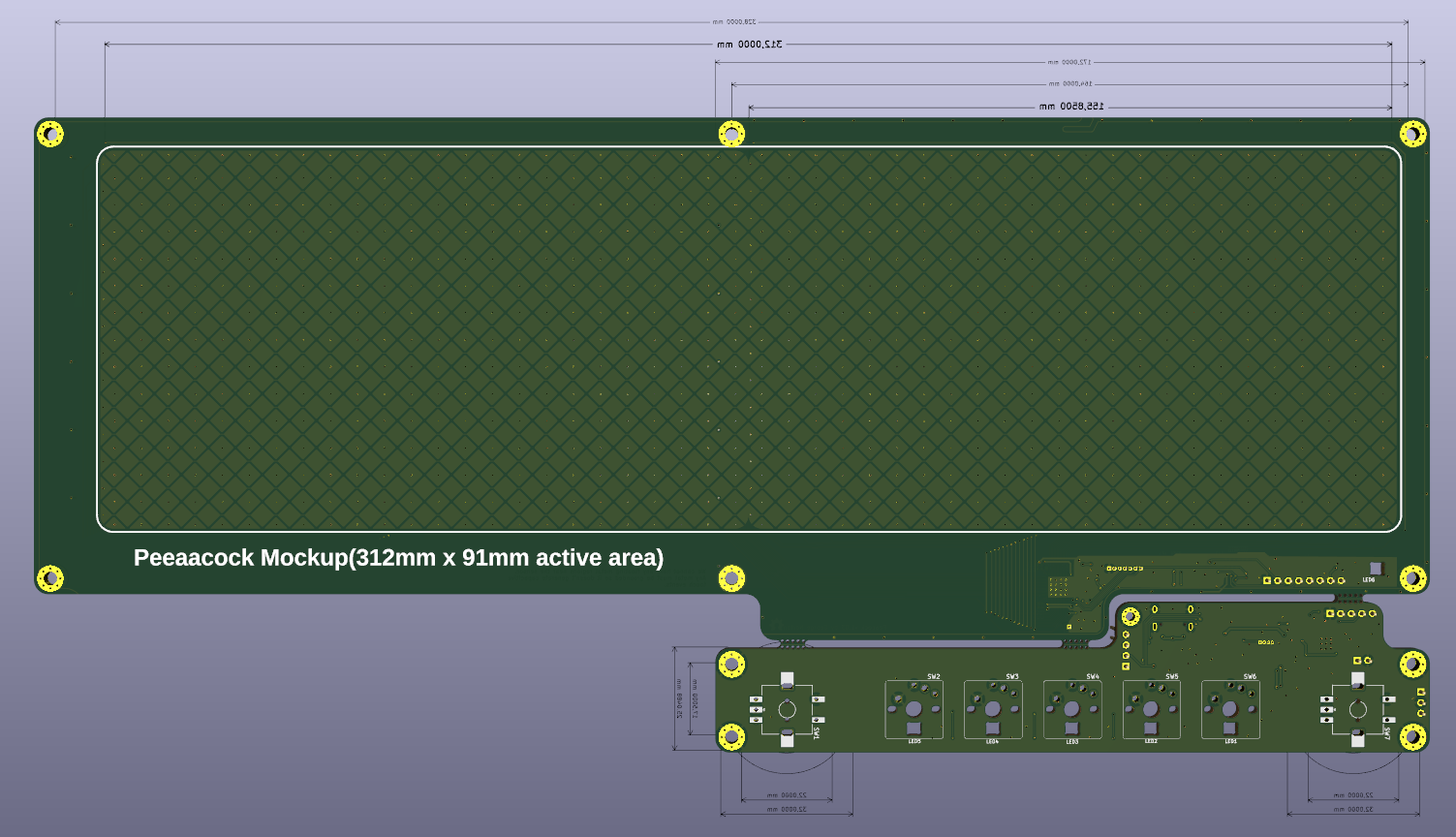
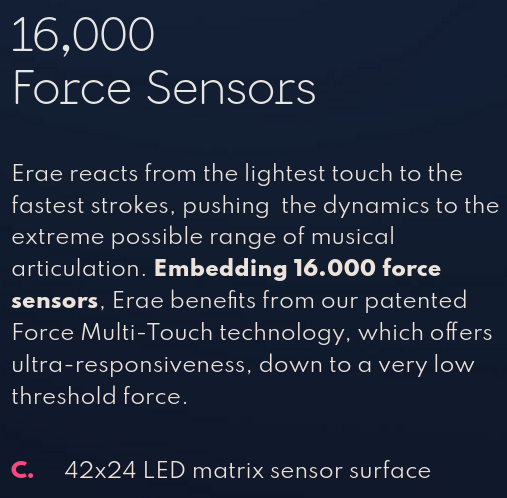
Wondering if it is possible to modify the design with a higher-class sensor IC! (Peacock uses a ATMXT336 which means 336 nodes (14 rows * 24 colums), newer ICs of that series offer far more nodes and don’t seem to cost much more. I remember reading about Embodme stating they have “over 1000 sensors” in the Erae, in something like a 25*42 nodes configuration?
(The idea of mastering QMK?? also put me off trying. I was wondering if proximity/coverage could be a separate layer in the PCB, or the reverse, though maybe it wouldn’t have to be. There’s also the poly/channel AT question. Channel might be enough.)
Haha yeah trying to not learn a wholly new protocol. You’d probably connect to the sensor directly via I2C and leave out the RP2040 part, or reprogram the RP2040 to spit out MIDI (if that’s possible - again something wholly new).
But to be honest, I am thinking about reworking this hardware design and placing a Ksoloti-type MCU I am obviously more familiar with. A Ksoloti Core on-board, if you will. Ksoloti Touch. Capaciloti.
I ran this patent through an OCR and now reading a google auto translation, I like the combined approach of capacitance (for its precision and multi-touch) and piezo (for impact force) though it still does not seem to allow for after-pressure / aftertouch-type gestures? It is not too clear if by piezoelectric they actually mean FSR (FSR is mentioned in the patent) and not a cheap piezo mic plate type.
Did Aodyo state or demonstrate anything about continuous pressure / aftertouch on the Loom?
This might be a solution in combination with a capacitive sensor.
You could combine both sensor data to get impact velocity and poly aftertouch. IMHO the FSR sensor does not need to be very precise in x/y to achieve this. The approximate location where the force is applied can be matched with the capacitive sensor’s precise coordinates. After all we are looking at fingertip-size pressure areas, not stylus.
I will be buying a few samples of the XYZ pad from Ceradex. If it works it could be scaled up and used as is, or it could be combined with a cap sensor.
In the Loom thread, fkberthold pointed out that: “Looking at the video, I would almost guess that it wasn’t based on pressure, but size of pressure point, looking at the way they lay their finger down on it to increase the amplitude.”
So…Manta-style cap-touch coverage rather than pressure I think.
“…the FSR sensor does not need to be very precise in x/y to achieve this. The approximate location where the force is applied can be matched with the capacitive sensor’s precise coordinates…”
That’s an interesting idea…using cap-touch positional info to identify an element in an FSR array in the same way the Loom patent describes with piezo arrays.
I’ll be interested to see how you get on with the Ceradex samples. I see they even suggest using it in instruments.
I am starting to suspect the XYZ pad is not suitable for multitouch. Great for a kaoss pad type with aftertouch, but Ceradex are instead recommending their “PMX1S Multi-Point Pressure Mapping Sensor” for my prototyping needs.
Coincidentally the looks of the PMX1S matrix is like one of your good old foot sensors, or also what could be seen inside the Seaboard Rise Block thing when these clowns were taking one apart.
I found demo videos for many sensors (and a way of purchase only in France, or very logically in one of their departments around the globe, but ONLY FRANCE) here: https://www.lextronic.fr
In the PMX1S datasheet they show a schematic setup not unlike the Linndrum, where the individual rows and columns are switched about and scanned using multiplexers. The 74HC595’s are for setting row ends low or high, and the 74HC4051’s scan the analog voltages at the respective columns. Not too intuitive schem but I believe I get the gist of it.
Also interesting that they don’t explicitly demo any “multi-velocity”, i.e. independent velocity per touch, or at least not in that video. Wondering how multi-touch-capable their velocity sensing using that piezo array (?) really was.
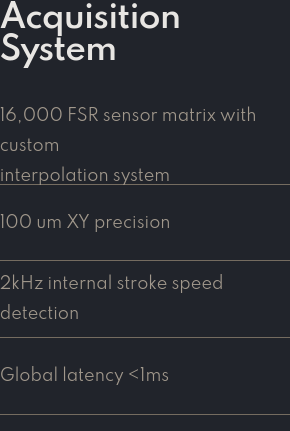
So this may mean a custom 128 * 128 force sensor matrix, multiplexed at high speeds (they mention like 5 MCUs doing simultaneous sensing jobs or something) in the Erae II. Thought this was capacitive somehow, guess it’s not then.
Anybody selling their Erae I as they are getting an Erae II by the way? I might need one, for science!
Not familiar…experimented a fair amount with the 74HC4067 though. (4-bit selection from 16 analogue channels with Teensy. Keep meaning to get round to testing two-tier multiplexing for large numbers of inputs.)
I recently pulled out my Seaboard 49 (not v2). Hadn’t used it in a while, after moving a few times, and being annoyed at Roli each time I unpacked.
Anyway, I have to say I still love the interface. Being keyboard adjacent serves my muscle memory, and the squish factor fits the haptics of how I’m manipulating sound.
I didn’t think I would feel anything, after spending so much time with osmose, but the design still holds up.